Introduction
This will be the final blog in the three part Priory navigation series. The first two exercises focused on traditional navigation (
orienteering post) using map and compass. Considerable effort was focused on map production (
map construction post) and elements essential to orienteering. Now that the orienteering exercise is complete, a comparative example with the modern technology of GPS will be used for navigation. Again it will be a race against the other 6 groups in this Field Methods class to finish the course.
There will be exceptions to this exercise. The previous exercise only required each group to navigate one of the five point courses, this time each group will navigate all three courses, 15 flags in total. In addition to navigating the entire orienteering course, there will be an added element of stress. To simulate high pressure deadlines and other daily stressors of real world career jobs, each group member will be given paintball guns. Since the main goal is a race to the finish, if you are hit you must stop for one minute. The only other rules require each group to carry a GPS and collect a point at each flag showing they made it to all the course flags.
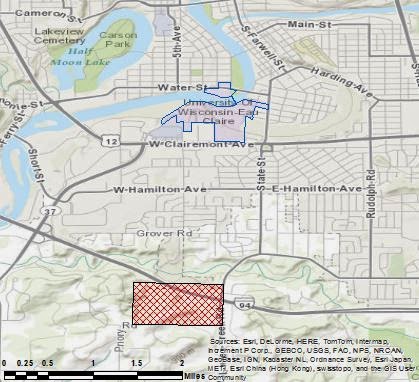 |
Figure 1 a locator map of the Priory. A 112-acre parcel of land
on lease by the University of Wisconsin - Eau Claire. On the
Priory land lays an orienteering course consisting of 15 flags.
Most of the course is found in dense tree covered land with
considerable underbrush. In addition, most of the land has
varied elevation, with the most hilly regions concentrated on
the western side of the course. |
Once again the course will be located at the Priory, shown by the red polygon in
figure 1. A 112-acre parcel of land located 2 miles south of the University of Wisconsin - Eau Claire campus.
The Priory consist of three buildings which host the UWEC childcare center and act as a dormitory for students during the school year. These buildings will be off limits during the exercise and designated as "no shooting zones." For liability reasons the students were told to stick to the trees and avoid the open areas at all costs. Even though the staff were informed of the situation, there was no reason to push the envelope on this situation. The actual orienteering course itself surrounds the buildings in the heavily wooded areas. Mostly consisting of deciduous trees, thick underbrush, and a group of pine trees on the eastern portion of the course.
Requirements for the Exercise:
1) No shooting or walking through the "no shooting zones"
2) No shooting at anyone without a mask on
3) Start at your assigned starting point (1, 2, or 3)
4) Travel to your assigned first point before all other points.
*The starting point and first point collected were assigned in order to disperse the groups around the course initially, increasing the chance of encounters later in the exercise.
Methods
After completion of the orienteering course it was an immediate realization how the terrain was a major factor in navigating. With this in mind, the planning for this GPS navigation exercise was much more extensive. As a group we spent three hours weighing the pros and cons of taking certain paths. Questions such as, which type of trees would be quickest to travel through? Would it be quicker to run along a ridge slightly out of the way, or go up and over the hill instead? All these parameters were layed out before we started making a map. We wanted to know what to look for before we started making hasty decisions.
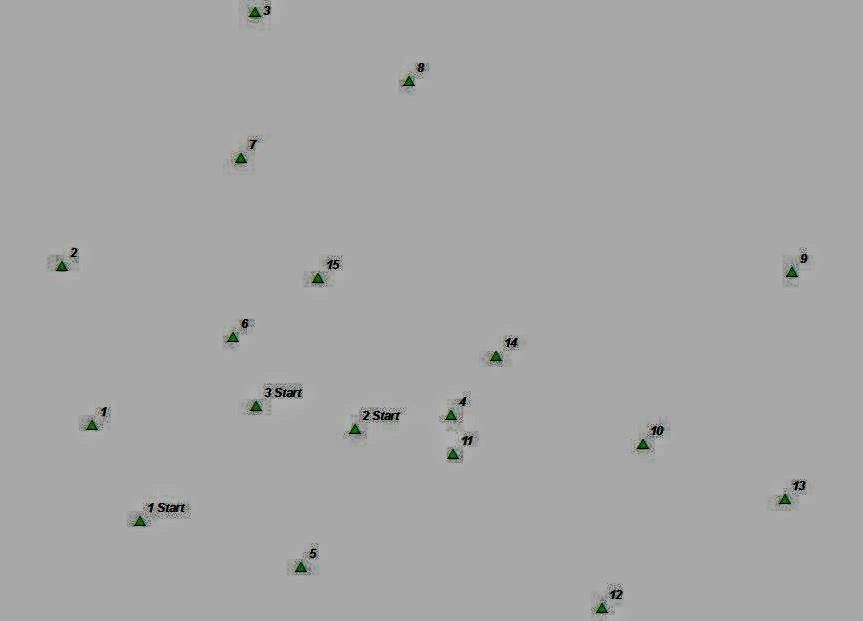 |
Figure 2 Shows the feature class newly acquired during this
exercise. The feature class includes all three starting points
for the different courses, as well as all 15 points on the
orienteering course. Our group started from "1 start"
and traveled to point 5 first. These were the only requirements
of travel, the rest of the points could be collected in any order. |
The first step taken was looking at the newly added feature class showing all 15 flag locations. We only had coordinates to these points during the last exercise, and we only plotted 5 of those points. So analyzing the points for the first time and thinking what the terrain around those points would be, was a rather important first step.
Figure 2 shows the feature class of the orienteering flags and the three starting points.
Next we had to develop a network to connect the points. Devise a rudimentary system to narrow down which routes were plausible and eliminate those illogical. To do this we digitized connecting lines from flag to flag. Since some routes were obvious choices not to take, these were omitted from the digitizing phase.
Figure 3 shows the results of the digitizing phase.
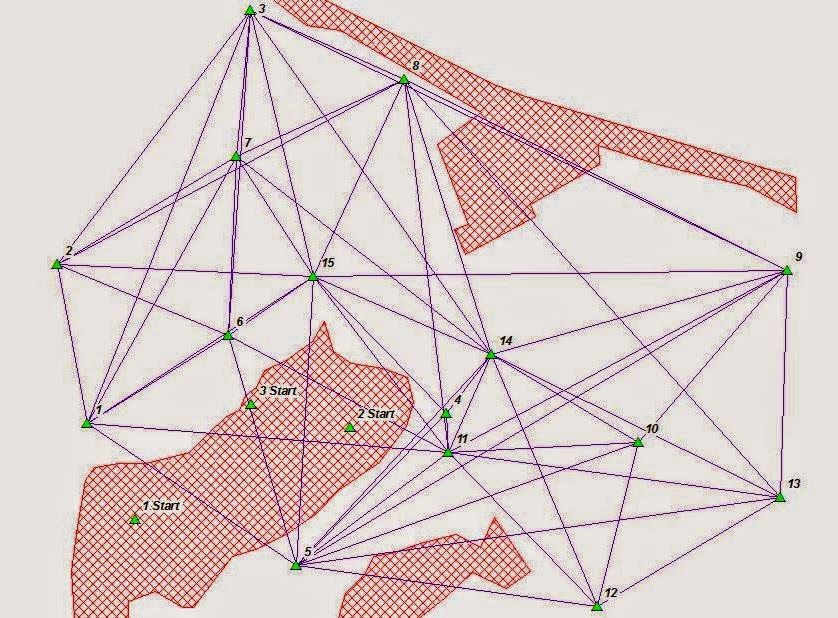 |
| Figure 3 Shows the feature class of orienteering flags, the digitized connecting paths, and the no shooting zones surrounding the childcare center (left), a local home (bottom/center), and a holding pond/I-94 (upper right). |
Next we brought in a DEM of the area. Looking at the elevation of the land was helpful, but it wasn't the most effective tool for navigating. That is why we created a slope feature class from the DEM. We created the slope feature class because some points were at the top of hills. This meant we had to get to the top, but some paths to the top require less energy than others.
Once we created the slope model, we then reclassified the feature class for better planning purposes. The reclass had three categories: low, medium, and high slope values. When planning the route we tried our best to stay out of the red areas, or areas of high slope. Even if we weren't traveling up the slopes, most of the trees were still difficult to walk through, especially the northwest quarter of the map, there was a lot of underbrush here.
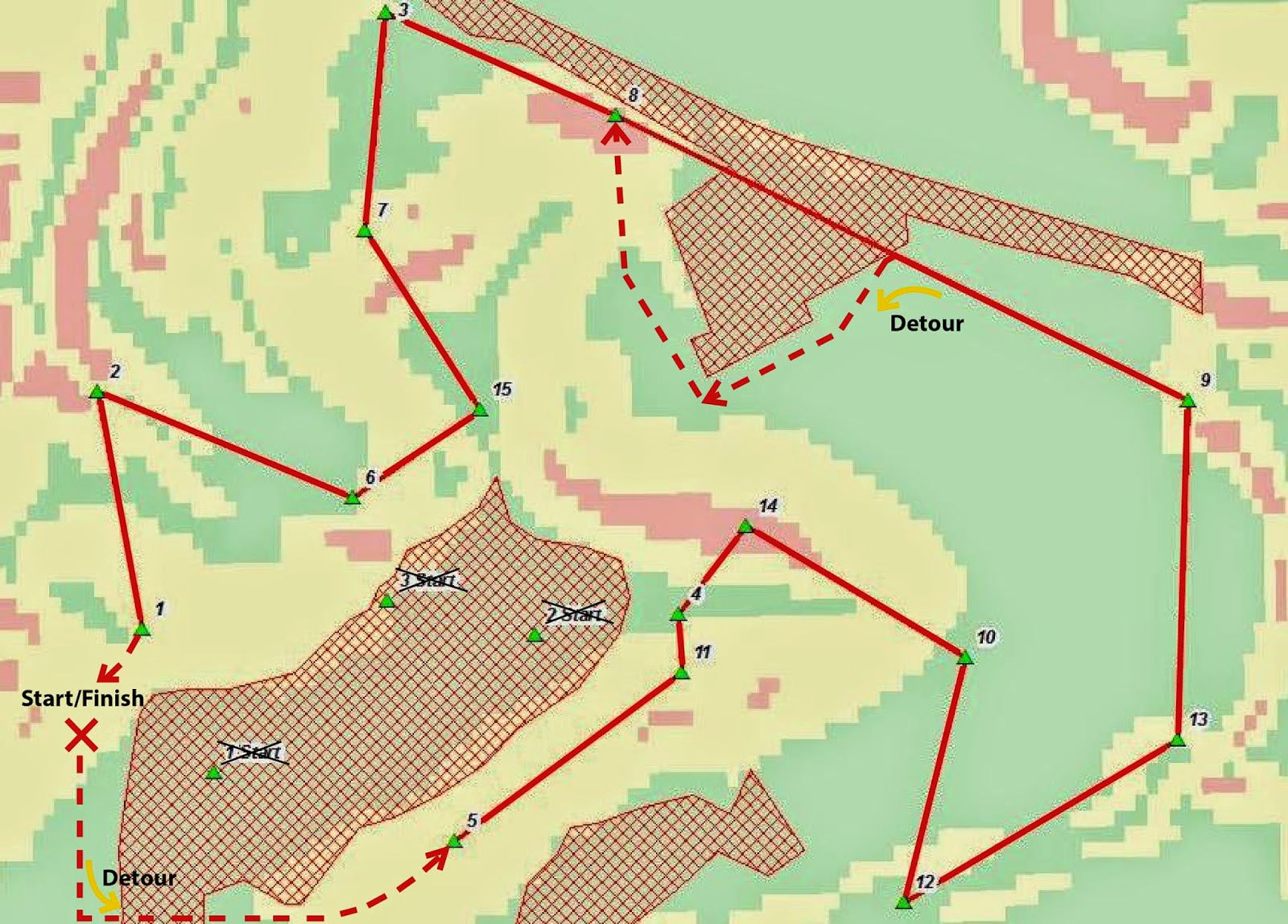 |
| Figure 4 shows the path the group decided was most efficient. Due to some last minute judgement calls the prior starting points were foregone to a more parent friendly location, which was located West of the parking lot (start point 1 was in the parking lot). Noteworthy observations of this figure are the dashed red lines. These lines represent routing changes while in the field. The new start/finish point meant we had to travel due South from the start and quickly cross over the parking lot entrance. The second detour came when we approached the holding pond. Once at the edge of the holding pond we reached a barbed-wire fence which we followed until we reached the normal planned route. Other features on the map is the classified slope model. Green = values of low slope, yellow = areas of moderate slope, and red = areas of high slope. |
Once the route was chosen, we had to decide what was going to be deployed to the GPS. Our Professor had stress the importance of only deploying the essential elements to ArcPad to decrease the loading time of the maps. We kept this in mind when we decided not to include the basemap. We were looking for speed, and we didn't want to wait around for the GPS to load every time the screen needed to be refreshed.
Figure 5 shows the three features included on the GPS: a point file for the flags, the path we were going to travel on, and the no shooting boundaries.
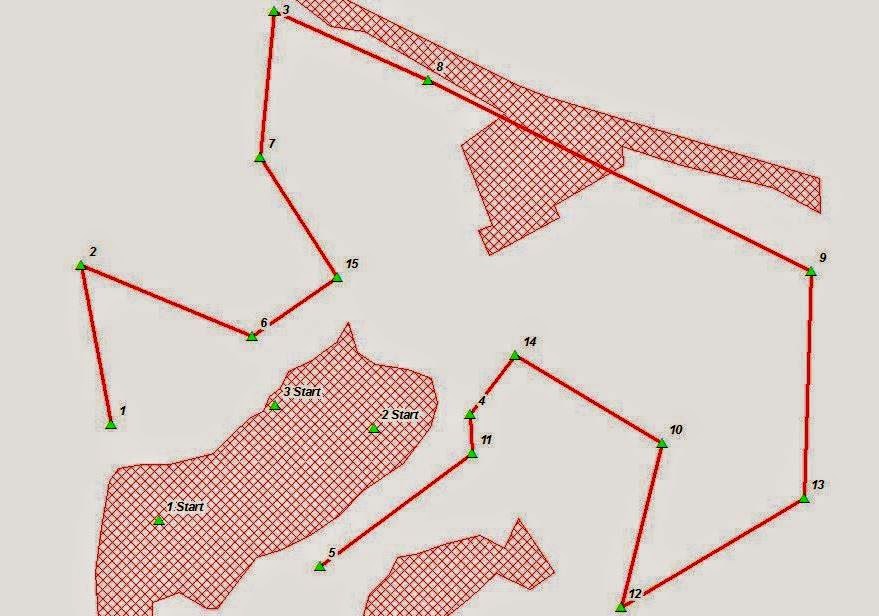 |
| Figure 5 shows the features chosen for upload with ArcPad onto the GPS unit. With the uncertainty of how the GPS would perform in the field the group thought it would be best to limit the features uploaded. Although there wasn't any reference information outside of the connecting lines/paths, the group decided that locator arrow was enough to navigate the course with. |
Since we knew there would only be one GPS in the group, we thought it would be important to bring a map with as well. Since the GPS didn't have a basemap, this was the first feature we added. Next, were the features deployed to ArcPad. During the process we discovered a shapefile detailing the location of all the trails at the priory. Initially we tried to include them in our analysis, but in the end we decided the searching for the trails could take longer than just blazing our own way through the trees. The last feature added was a table showing the distances between each point.
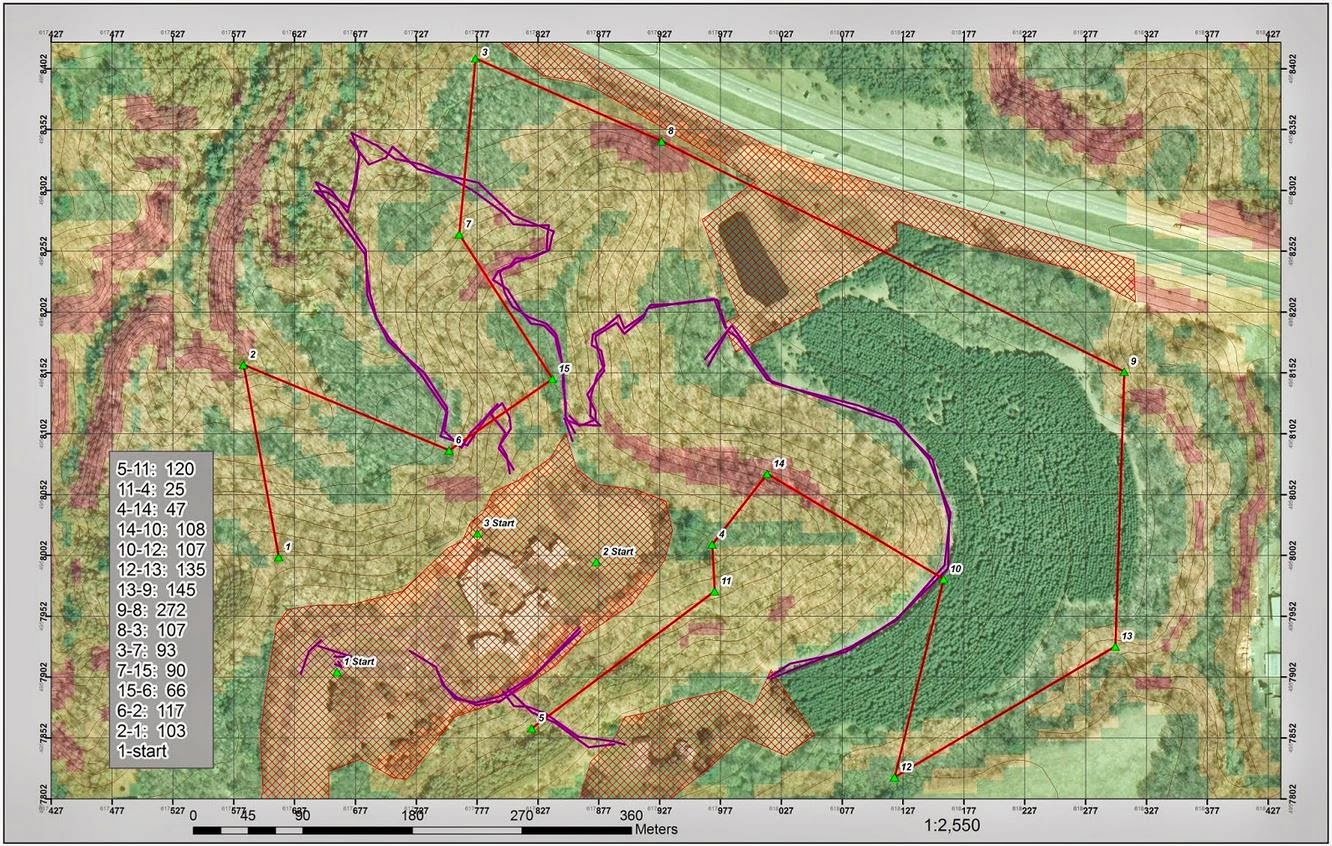 |
Figure 6 shows the field map created for the members without a GPS. The values in the lower left hand table are the distance in meters between each point. The red lines are the path we decided to take. The purple lines are trails throughout the priory. The red hash zones are no shooting zones. There are also contour lines at 5 meter intervals. Notice how the areas of low slope can also change elevation, and how many of the points are located along the high slope zones.
*Green = low slope *Yellow = moderate slope *Red = high slope values. |
Discussion
Since we only deployed the path we were going to follow and the points we were very dependent on the GPS. For the most part the GPS performed better than I expected. However, there were times when the GPS would start jumping around all over the place and ultimately end in unknown space. To fix this we backed out of ArcPad and reopened the file. It was a pain to stop and wait for the file to load again, but there was nothing else we could do. After completion of the exercise we talked to the other groups and they had similar issues.
The most significant complication during the race was the paintball equipment. Running around on a 70 degree day with a 25 lb. gun and a mask was not ideal. The mask kept fogging up and clouding your vision. This only made you more anxious because you couldn't see and you thought you were going to get shot. Right around this time the GPS would start to bounce all over the place and when you were trying to fix the GPS you couldn't see anything. Being stressed was definitely part of the exercise. Whenever this would happen we would have two people post up on opposite sides to watch for opposing teams. Then the GPS person would kneel down and try to fix the problem. This was important because it helped everyone relax. It meant we weren't going to be running anywhere soon and the tension would clear the air. It was little examples like this for why I thought our group worked together. Nobody panicked, we just dealt with the cards we were given and moved on.
In conclusion of which method was easier, the GPS or the map/compass, I would hands down say the GPS was easier. With the GPS you could walk off path and easily walk back to the line on screen. Sometimes the GPS was slow to pick up on the direction of travel, but we never walked more then 20 meters in the wrong direction. With the map/compass when you walked off course you lost the bearing, and getting off track was much easier than I initial anticipated. Often times you would have to stop and find yourself on the map. Two times we had find a new bearing and backtrack to where we thought the point was. Although with the map and compass navigation we didn't have a feature class for the flag locations either, that would have likely made navigating more precise and consequently easier.
Conclusion
We were inside on this day, and the activity was pushed to the 5th. Yes, you can combine what you did in the lab with the event. In fact, it was almost good that you had this day as you should really stress on the planning, and what the actual outcome was. Make sure you discuss if the GPS made navigation faster, or if the technology had it's faults such as turning off, losing satellites, etc.
This final GPS navigation exercise was a very effective exercise to wrap up the field methods class. It could be said that the class just went out and shot paintball guns, but the lab was so much more than that. The day in the lab was used to get the students to think outside of the box to create the most efficient path through the variable terrain. This excited the students and created interest in the subject. Between classes each group had the responsibility of checking out and deploying their maps to their individual GPSs. Once out in the field the heightened anxiety of getting shot showed who could concentrate under pressure and still perform their duties. In the end we all had a blast, learned a lot about navigating with both traditional and modern methods, and increased our love of geography.